← 返回








PAW-150管道及压力容器全位置焊接机器人
设备简介
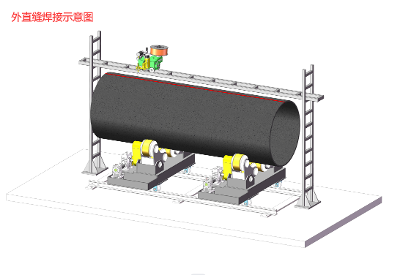
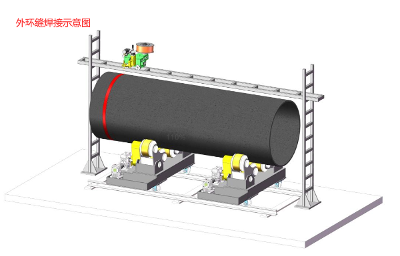
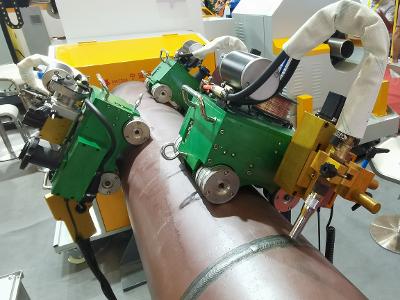
该管道及压力容器全位置焊接机器人采用工件固定不动,焊接爬行小车绕管道或压力容器的筒体圆周爬行的方式实现全位置自动焊接,同时可增加简易轨道通过爬行小车直线行走实现筒体的直缝焊接。 该产品设计轻巧、集成度高、移动方便,无论厂内或露天厂外均可方便作业, 广泛运用于石油、石化、化工、天然气、海工、市政、热力供暖等行业管道及压力容器的自动焊接, 焊接工艺可选用熔化极气体保护焊或钨极氩弧焊。
性能参数
| 设备型号 | PAM-150 |
|---|---|
| 适用管径 | ≥DN150 |
| 适用材质 | 碳钢、合金钢、不锈钢 |
| 适用焊丝 | 实心焊丝或药芯焊丝 |
| 焊枪调节 | 电动,上下调节行程128mm,左右调节行程78mm |
| 适用工件焊缝 | 坡口环焊缝、直焊缝 |
| 焊缝位置 | 1G、2G、3G、4G、5G、6G |
| 焊接工艺 | □TIG □GMAW □热丝TIG |
| 结构特点 | 设计轻巧,小车主体采用航空铝合金制作;集成度高,送丝机构集成于小车上,焊接稳定性好 |
| 连接电缆 | 标配15m,可选:20m或30m |
| 控制方式 | 带液晶屏的手持遥控盒控制,通过液晶屏设定参数,软按钮微调 |
| 设备基本组成 | 爬行焊接小车+手持式智能遥控盒+焊接电源+移动式专用存放箱。焊接不可吸附的材料如不锈钢时需加配行走轨道 |
※因产品不断迭代升级及不同行业用户使用情况不同,配置及性能参数以产品订购时为准。
{kind=link}